熱門資訊> 正文
為什麼特斯拉、蔚來、小鵬都會撞上側翻靜止車輛?
2022-04-27 19:25
- 小鵬汽車(XPEV) 0
- 特斯拉(TSLA) 0
- 蔚來(NIO) 0
近日,「車主稱小鵬汽車自動輔助駕駛失靈」一時成為熱門話題。
小鵬汽車車主鄧先生稱在國道上開啟自動輔助駕駛行駛十幾公里后,突遇一輛側翻在道路上的汽車,沒有任何報警和減速,車子徑直撞了上去。釀成悲劇。
又是側翻靜止車輛。無獨有偶,特斯拉和蔚來也遇到過這樣的情況。
2021 年 1 月底,蔚來 ES8 在高速公路上開啟 L2 級自動駕駛功能 (NOP,領航輔助) 時,撞上一臺靜止五菱宏光。
2020 年 6 月初,特斯拉 Model 3 高速公路上開啟 L2 級自動駕駛功能 (AP,領航輔助) 時,撞上一輛側翻的貨車。
為什麼這樣的事情一直出現呢?為什麼車企看到友商有這樣的問題,不去做規避呢?
在回答這個問題之前呢,我們先來看汽車在開啟 L2 級輔助駕駛系統時,是如何工作的?
汽車在開啟 L2 級輔助駕駛系統狀態中,在駕駛員的監控下可自主完成變道超車、自動駛入、駛出匝道等操作。這就好比人開車一樣,汽車在這個狀態中是有 感知 ( 收集道路信息) 、 決策 (知道怎麼開) 、 執行 的能力 (執行規劃好的策略) 。
無法躲避靜止車輛,很明顯就是 感知層出了問題 。
我們接下來看這三家車企所採取的輔助駕駛感知方案!

蔚來 ES8 搭載了 25 個傳感器,一個前向 3 目攝像頭、5 個毫米波雷達、4 個環視攝像頭和 12 個超聲波雷達、一個駕駛員監測攝像頭。
特斯拉 Model Y周身搭載了 8 個攝像頭,1 個毫米波雷達,和 12 個超聲波雷達。
小鵬 P7 XPILOT 2.5 系統 搭載了 22 個傳感器,包括一個前向單目攝像頭、4 顆泊車 360 度環視攝像頭、1 顆車內人臉識別攝像頭、1 顆行車記錄儀攝像頭、3 個毫米波雷達、12 顆超聲波雷達。
特斯拉和蔚來雖然是三目前視攝像頭,但並沒有使用立體視覺,三個攝像頭主要是焦距不同,看的視野範圍不同。所以總的來説,他們三家使用的都是視覺+毫米波雷達的傳感器方案。

別看搭載如此多的智能傳感器,但在開啟 L2 級自動駕駛系統 (Autopilot、NOA 或 EAP 系統) 時,車輛主要依靠前視攝像頭和毫米波雷達探測前方物體。
這個架構換句話説就是視覺是主傳感器,然后再用毫米波雷達進行輔助。其中視覺傳感器的權重高,毫米波雷達的權重低。
使用 視覺+毫米波雷達 的傳感器方案,只要不是雙目立體視覺,不管是使用基於規則的視覺算法還是使用深度學習技術,都有着天然的無法改變的缺陷,這個缺陷表現爲——對有些目標物無法識別。
無論是基於規則的視覺算法還是使用深度學習技術,都要有一個大前提,即有相應的數據,才能認識,才能識別。
比如説:沒有見過的情景,訓練數據集無法完全覆蓋真實世界的全部目標,能覆蓋 10% 都已經是很不錯了,那剩下的 90% 沒有見過便不能識別,更何況真實世界每時每刻都在產生着新的不規則目標。比如説壞在路上的車。
特斯拉多次事故都是如此,比如在中國兩次在高速公路上追尾掃地車 (第一次致人死亡) ,在美國多次追尾消防車。
第二個就是 圖像缺乏紋理特徵 ,就像攝像頭面前放一張白紙,自然識別不出來是什麼物體。
某些底盤高的大貨車側面在某一時刻或者一堵白牆,就是白紙一樣,基於深度學習的機器視覺此時就如同瞎子,不減速就直接撞上去。
爲了彌補這種失誤,因此在視覺的基礎上再引入毫米波雷達的探測結果進行驗證。
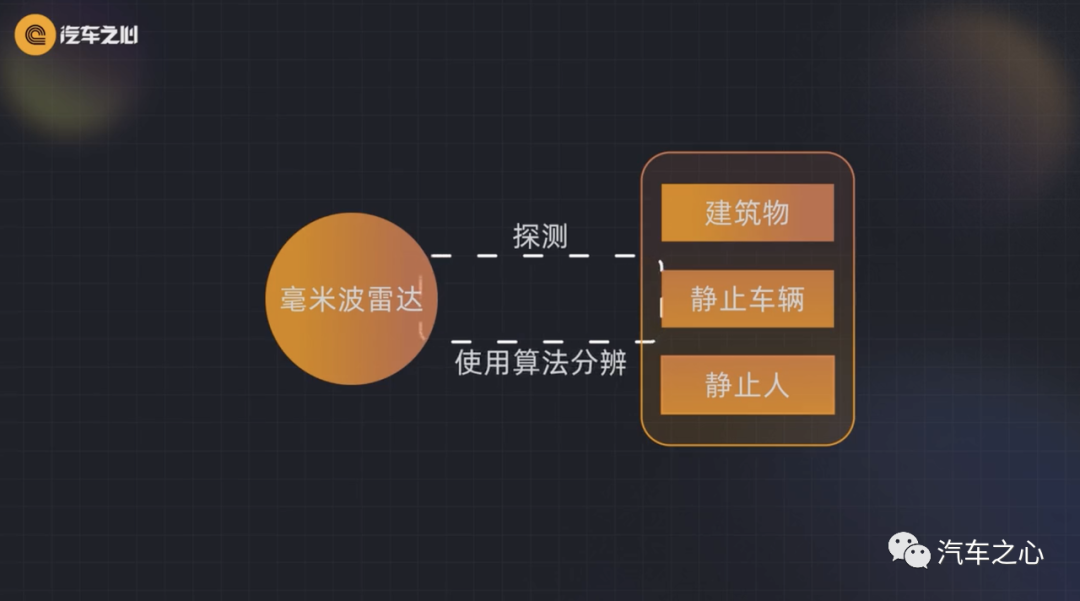
但毫米波雷達探測靜止目標信息時,有一個缺陷,它可以探測到靜態目標包括建築物、車輛、行人等。但是不能很好區別和識別。需要一定的算法才能從中分辨出目標。
舉個例子:比如是一個行駛中的汽車,毫米波雷達是能比較好探測到目標的。如果卡車靜止或者移動速度很慢,毫米波雷達就需要相應的算法來探知前方是否有物體。
再有就是毫米波雷達,目前量產車的毫米波雷達角分辨率太低,毫米波雷達安裝的角度也很低,對金屬物體又過於敏感。
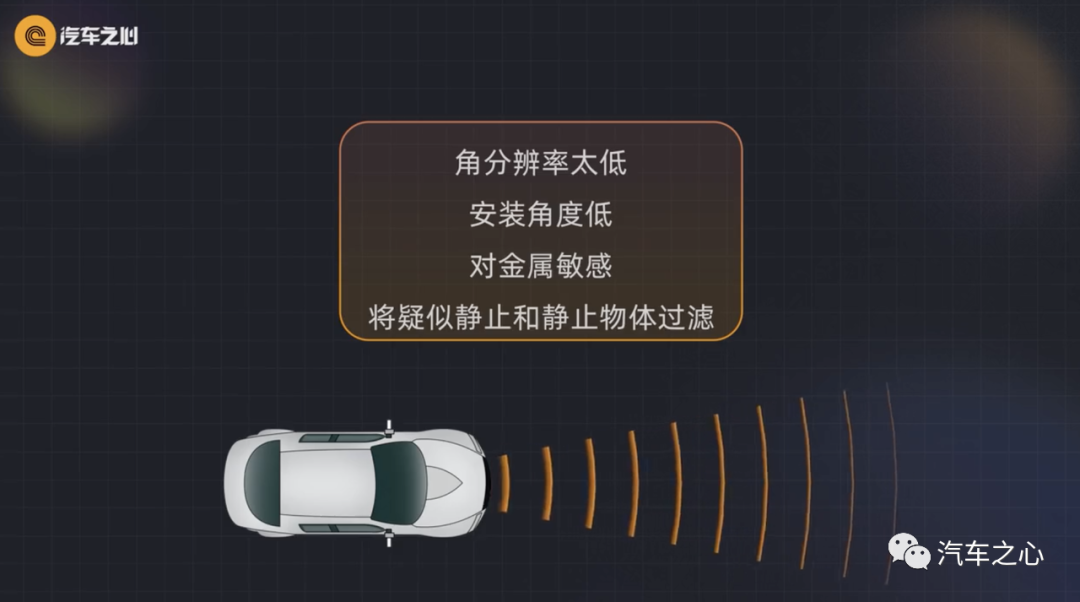
為避免誤操作,雷達公司和一些車企在拿到雷達的反射數據后,會通過算法直接將一些靜止物體,或者疑似靜止的物體過濾掉,以避免產生錯誤的反應。
所有的毫米波雷達都會將靜態目標過濾掉或遇上底盤比較高的大貨車,可能也會檢測不到。

這就是現階段使用攝像頭和毫米波雷達方案的弊端。視覺看到了無法識別,毫米波雷達也探測到了,也因為無法區別和分辨,就給過濾掉了。
那結果就是無法識別目標就認為目標不存在,與盲人無異——車輛會認為前方無障礙物,然后不減速直接撞上去。
針對這種技術的缺陷,有些整車廠研製了新的技術方案,比如奔馳、豐田的立體 雙目方案 ,也有比如現在新勢力整車廠宣傳的 激光雷達融合方案 !
激光雷達和立體雙目為傳感器的方案也只是能解決一些問題而已,只不過現在沒有大規模的應用,所以發生問題的個例還沒暴露。
那為何要將這樣一種有缺陷的技術安裝上車呢?
其實這個不算缺陷,只是大家對於這種技術的能力邊界認知不夠清晰。
這個不得不提自動駕駛的分級。
當下車企所宣傳的「無人駕駛」、「自動駕駛」,其實都是 L2 級別的自動輔助駕駛。
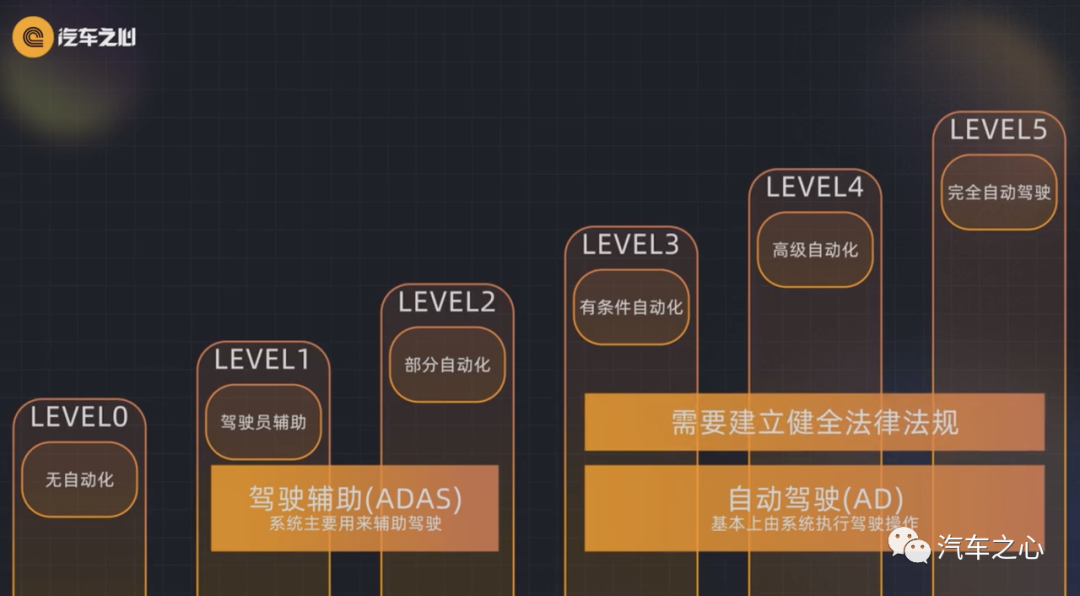
根據 SAE (美國汽車工程師學會) 的分類,自動駕駛可以分為 L0-L5 級 六個階段。
其中, L0 代表無自動輔助功能;L1-L2 為駕駛輔助系統,駕駛員是車輛操作的主體;L3-L4 為有條件的自動駕駛系統;只有到了 L5 纔是真正的無人駕駛。
L2 級別可以實現的功能有,在高速上能獨立完成打燈變道、超車、跟車、上下匝道等開車技能,但需要駕駛員時刻集中精力,隨時準備接管。
L2 及以下級別是自動駕駛的初級水平,這個區間的自動駕駛技術不具備「全自動駕駛能力」,是始終需要人類監管的駕駛輔助系統——事故主要責任人始終是人類駕駛員。
對於一名汽車用户而言,「輔助」駕駛與「自動」駕駛的概念功能,本應該是最基本的認知常識。可悲的是,自動駕駛行業里的玩家長期以來都在誇大宣傳,忽悠用户。
特斯拉宣傳頁面

威馬 W6 宣傳頁面
這種宣傳狀況是經過去年的「蔚來 ES8 車主啟用 NOP 領航功能,在沈海高速涵江段發生交通事故,不幸逝世。」事件之后,纔有所改觀。
但是,已經逐漸習慣並且依賴這一套系統的消費者們,其實並不清楚自己開啟的是怎樣一套系統,以及這套系統是否存在風險。
很多時候,他們依據名字來判斷。就好比這名小鵬車主所説的「自動輔助駕駛」,可能對於這名小鵬車主來説,他也不知道,在所謂的自動輔助駕駛模式下,究竟什麼可做什麼不可做。
這就會造成誤差,一些人太信任自動輔助駕駛系統,以為開車時完全可以解放雙手雙腳。但遇到一些無法識別的情況,可能就會釀成悲劇。
最后建議大家使用此類功能時,多讀用户手冊,看車企提供的講解視頻,瞭解自動輔助駕駛的能力邊界在哪里,為自己的安全負責!
推薦文章
英偉達期權鏈暗示財報后股價大幅波動?市場押注3500億美元市值巨震!

新股申購 | 「3D打印公司」創想三維今起招股!一手入場費2848.44港元
華盛早報 | 特朗普稱將很快結束對伊戰爭!30年美債收益率升至近20年來最高水平;英偉達今日盤后放榜
5月20日外盤頭條:特朗普再發威脅 谷歌升級搜索 大幅下調訂閲價格 北約開始考慮護航船霍爾木茲海峽
美股機會日報 | 重磅信號!中美敲定AI政府間對話;三大期指盤前悉數走低;谷歌開發者大會將於次日凌晨1點開幕
一圖看懂 | 嗶哩嗶哩Q1營收74.7億元略超預期,經調整淨利同比大增62%;月活用户突破3.76億,用户時長再創新高
華盛早報 | 特朗普「急剎車」推迟對伊攻擊!暗示重回談判桌;大摩稱債市拋售潮或衝擊美股漲勢;韓國法院要求三星罷工不得影響產量
谷歌持倉驟增超200%!時隔六年后「買回」達美航空,伯克希爾這一次的作業能抄嗎?
